Cornell University
Autonomous
Underwater Vehicle
Project Team
Cornell University
Autonomous
Underwater Vehicle
Project Team
Research Design Build Win
Diving In
CUAUV designs, builds, programs and tests two completely new autonomous submarines every year to compete in the Association for Unmanned Vehicle Systems International (AUVSI) International RoboSub competition.
In August, we ship our subs down to San Diego, drop it in a recommissioned Navy testing pool, press the green button, and cheer it on as it navigates a complicated underwater obstacle course with no human intervention whatsoever: ramming buoys, dropping weighted darts on Space Invader-shaped objects, firing torpedoes through differently colored targets, re-positioning PVC structures and more.
As a seven-time RoboSub champion, CUAUV embodies a tradition of excellence and continuously pushes the envelope of autonomous underwater vehicle technology.
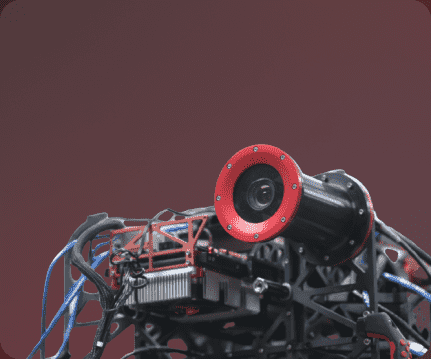
This year’s sub, Orion, is focused on system complexity, efficiency, and reliability, while also maximizing stability and enclosure accessibility...
Learn Morefounded
vehicles made
hours logged


Mechanical
Subteam
We design, test, manufacture, and integrate the submarine's enclosures and systems!